PID là gì?
PID (Proportional Integral Derivative) là một cơ chế phản hồi vòng điều khiển được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp. Bộ điều khiển PID được sử dụng nhiều nhất trong các hệ thống điều khiển vòng kín (có tín hiệu phản hồi). Bộ điều khiển PID sẽ tính toán giá trị sai số là hiệu số giữa giá trị đo thông số biến đổi và giá trị đặt mong muốn. Bộ điều khiển sẽ thực hiện giảm tối đa sai số bằng cách điều chỉnh giá trị điều khiển đầu vào. Để đạt được kết quả tốt nhất, các thông số PID sử dụng trong tính toán phải điều chỉnh theo tính chất của hệ thống-trong khi kiểu điều khiển là giống nhau, các thông số phải phụ thuộc vào đặc thù của hệ thống.
Trong đó:
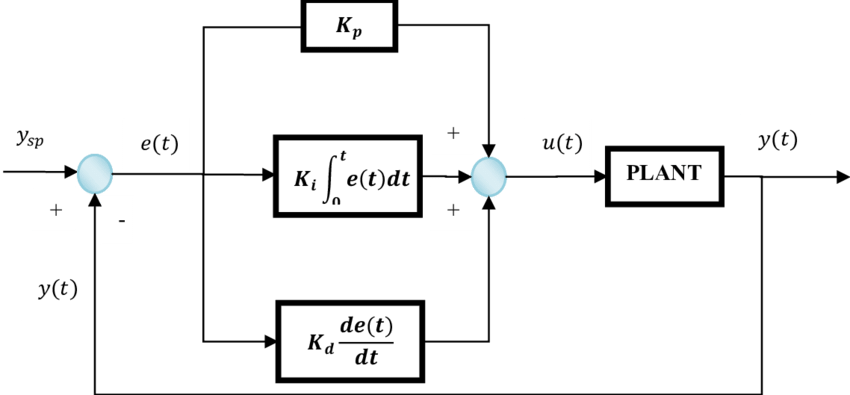
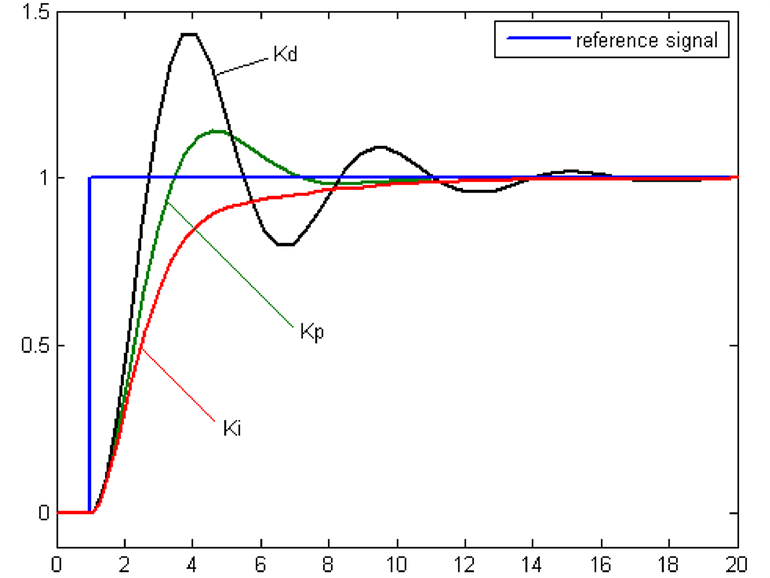
- P (Proportional): là phương pháp điều chỉnh tỉ lệ, giúp tạo ra tín hiệu điều chỉnh tỉ lệ với sai lệch đầu vào theo thời gian lấy mẫu.
- I (Integral): là tích phân của sai lệch theo thời gian lấy mẫu. Điều khiển tích phân là phương pháp điều chỉnh để tạo ra các tín hiệu điều chỉnh sao cho độ sai lệch giảm về 0. Từ đó cho ta biết tổng sai số tức thời theo thời gian hay sai số tích lũy trong quá khứ. Khi thời gian càng nhỏ thể hiện tác động điều chỉnh tích phân càng mạnh, tương ứng với độ lệch càng nhỏ.
- D (Derivative): là vi phân của sai lệch. Điều khiển vi phân tạo ra tín hiệu điều chỉnh sao cho tỉ lệ với tốc độ thay đổi sai lệch đầu vào. Thời gian càng lớn thì phạm vi điều chỉnh vi phân càng mạnh, tương ứng với bộ điều chỉnh đáp ứng với thay đổi đầu vào càng nhanh.
Các loại bộ điều khiển PID
- Bộ điều khiển tỉ lệ – P (Proportional Controller).
- PI ( Proportinal and Integral Controller) gọi là bộ điều khiển tỉ lệ và tích phân.
- PD (Proportional and Derivative (PD) Controller ) gọi là bộ điều khiển đạo hàm.
- PID (Proportional, Integral, and Derivative (PID) Controller) là bộ điều khiển tỉ lệ – tích phân- đạo hàm (vi phân).
Tại sao cần điều khiển PID
Để có thể hiểu về điều khiển PID một cách dễ dàng, chúng ta cùng xét dựa trên một bài toán: Kiểm soát nhiệt độ nước xả ra từ lò sưởi đốt gas công nghiệp.
TH1: kiểm soát nhiệt độ theo phương pháp thủ công
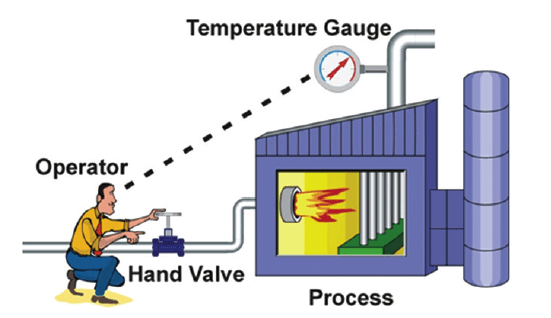
Để kiểm soát nhiệt độ cho nước xả ra từ lò sưởi đốt gas công nghiệp, người vận hành phải xem đồng hồ đo nhiệt độ và điều chỉnh van gas nhiên liệu cho phù hợp. Nếu nhiệt độ nước vượt quá yêu cầu, người vận hành phải giảm góc mở van gas (đóng van vừa đủ) nhằm giảm nguyên liệu đốt để giảm nhiệt độ nước xả ra theo giá trị mong muốn. Nếu nhiệt độ nước giảm xuống dưới mức yêu cầu, người vận hành phải tăng góc mở van gas (mở van vừa đủ) nhằm đưa thêm nguyên liệu đốt vào lò để tăng nhiệt độ nước xả ra theo giá trị mong muốn.
Nhiệm vụ điều khiển được thực hiện bởi người vận hành được gọi là điều khiển phản hồi, bởi vì người vận hành thay đổi tốc độ đốt (nguồn cấp nguyên liệu đốt) dựa trên phản hồi từ quá trình thông qua đồng hồ đo nhiệt độ. Người vận hành, van, lò sưởi và đồng hồ đo nhiệt độ tạo thành một vòng điều khiển. Bất kỳ thay đổi nào của người vận hành đối với van gas đều ảnh hưởng đến nhiệt độ, và kết quả được đưa trở lại cho người vận hành thông qua đồng hồ đo nhiệt, và nó là vòng lặp đóng.
TH2: kiểm soát nhiệt độ theo phương pháp tự động (điều khiển PID)
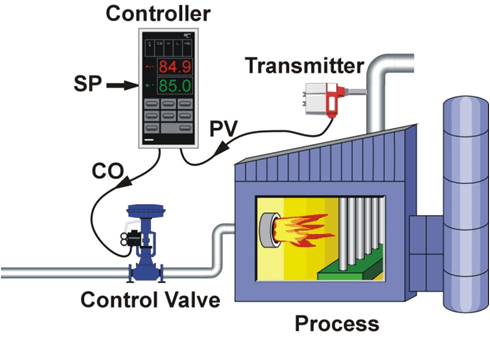
Thay vì kiểm soát nhiệt độ theo phương pháp thủ công như trên, chúng ta dễ dàng kiểm soát được nhiệt độ của nước xả ra từ lò sưởi đốt gas công nghiệp bằng phương pháp tự động (sử dụng bộ điều khiển PID). Và có một số công việc cần thực hiện để hệ thống này có thể hoạt động một cách tự động như sau:
- Sử dụng thiết bị đo nhiệt độ điện tử
- Sử dụng van điều khiển điện tử (có thể tích hợp thêm bộ truyền động, bộ xác định vị trí,..)
- Sử dụng bộ điều khiển (PID) và thiết lập, cũng như kết nối nó với thiết bị đo nhiệt độ và van điều khiển điện tử.
Người vận hành thiết lập tham số điểm đặt cho bộ điều khiển PID ở nhiệt độ mong muốn và đầu ra của bộ điều khiển là đặt vị trí của van điều khiển (đặt giá trị góc mở van). Nhiệt độ đo được từ cảm biến nhiệt độ, được gọi là biến quá trình, sau đó được truyền đến bộ điều khiển PID. Bộ điều khiển so sánh giá trị nhiệt độ nhận được từ cảm biến với giá trị nhiệt độ điểm đặt ban đầu và tính toán chênh lệch hoặc sai số giữa hai tín hiệu. Dựa trên sai số và các hằng số điều chỉnh của bộ điều khiển, bộ điều khiển tính toán đầu ra thích hợp để điều khiển góc mở van ở vị trí chính xác nhằm giữ nhiệt độ luôn nằm tại giá trị điểm đặt. Nếu nhiệt độ tăng trên điểm đặt của nó, bộ điều khiển sẽ giảm góc mở van và ngược lại.