Bạn có bao giờ tự hỏi hay nghĩ về cách để điều khiển một con robot (trong ứng dụng quân sự chúng ta thường thấy những con robot giữ bom, gỡ bom,..); hay đơn giản hơn là những cánh tay robot trong các hệ thống dây chuyền trong công nghiệp; hay là các máy cắt cnc với khả năng chuyển động chính xác để phay, tiện hay uốn kim loại hoặc các hệ thống định vị ăng-ten kiểm soát độ chính xác theo phương vị và độ cao, chúng hoạt động như thế nào? Tại sao chúng có thể chuyển động chính xác được như vậy?
Bạn sẽ trả lời được các câu hỏi ở trên thông qua bài viết này, các ứng dụng của động cơ Servo được sử dụng phổ biến trong các hệ thống vòng kín, nhằm điều khiển vị trí chính xác mà chúng ta thường thấy trong các ứng dụng công nghiệp và tại các cuộc triển lãm, trưng bày. Nếu tìm hiểu động cơ thì chắc hẳn bạn đã từng nghe và biết đến người anh em của Servo Motor là Stepper Motor (thường được sử dụng trong các hệ vòng hở).
Trong bài này, chúng ta sẽ cùng tìm hiểu về động cơ Servo là gì, cách mà chúng hoạt động và xem xét một số tính năng của loại động cơ này kèm theo đó là các ứng dụng của nó.
Động cơ Servo là gì?
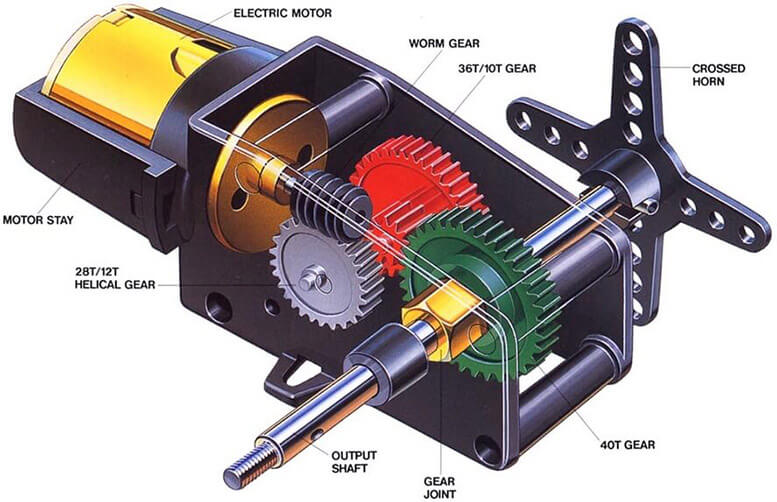
Động cơ Servo là một phần của hệ thống vòng kín và bao gồm một số bộ phận cụ thể là mạch điều khiển, động cơ Servo, trục, chiết áp, bánh răng truyền động, bộ khuếch đại và bộ mã hóa (encoder) hoặc bộ phân giải.
Động cơ Servo là một thiết bị điện độc lập, được sử dụng để quay các bộ phận của máy với hiệu suất cao và độ chính xác cao.
Trục đầu ra của động cơ này có thể được di chuyển đến một góc, một vị trí với một vận tốc chỉ định trước mà động cơ thông thường không có.
Hiểu đơn giản thì động cơ Servo như một động cơ thông thường và kết hợp nó với một cảm biến để phản hồi vị trí.
Bộ điều khiển là bộ phận quan trọng nhất của động cơ Servo được thiết kế và sử dụng chuyên biệt cho mục đích này.
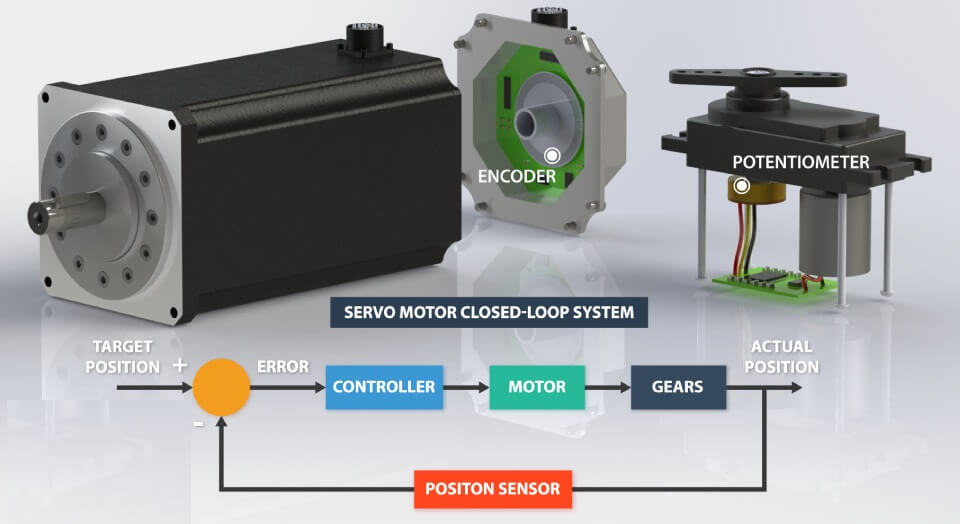
Động cơ Servo là một cơ chế vòng kín kết hợp phản hồi vị trí để điều khiển tốc độ và vị trí quay hoặc tuyến tính.
Động cơ được điều khiển bằng tín hiệu điện, analog hoặc digital, xác định chuyển động theo vị trí lệnh cuối cùng của trục.
Encoder đóng vai trò như một cảm biến cung cấp phản hồi về tốc độ và vị trí. Mạch này được xây dựng ngay bên trong vỏ động cơ thường được lắp với hệ thống bánh răng.
Phân loại động cơ Servo

Động cơ Servo được phân thành các loại khác nhau dựa trên ứng dụng của chúng, chẳng hạn như động cơ Servo AC và động cơ Servo DC.
Có ba lưu ý chính để lựa chọn động cơ Servo. Đầu tiên dựa trên dòng điện/điện áp sử dụng của chúng là AC hoặc DC, và thứ hai là loại động cơ có sử dụng chổi than hay không và lưu ý thứ ba thường là trường quay động cơ, rôto, chuyển động quay là đồng bộ hay không đồng bộ.
Động cơ Servo AC hay DC
Xét theo hiệu suất, sự khác biệt cơ bản giữa động cơ AC và DC là ở khả năng kiểm soát tốc độ.
Với động cơ điện một chiều, tốc độ tỷ lệ thuận với điện áp cung cấp với tải không đổi.
Và trong động cơ xoay chiều, tốc độ được xác định bởi tần số của điện áp đặt vào và số cực từ.
Động cơ Servo AC sẽ chịu được dòng điện cao hơn và được sử dụng phổ biến hơn trong các ứng dụng Servo như: với rô bốt, trong dây chuyền sản xuất và các ứng dụng công nghiệp khác đòi hỏi số lần lặp lại cao và độ chính xác cao.
Động cơ Servo có chổi than hay không chổi than
Động cơ Servo DC được chuyển mạch cơ học với chổi than, sử dụng cổ góp hoặc điện tử không có chổi than.
Động cơ có chổi than thường ít tốn kém hơn và vận hành đơn giản hơn, trong khi thiết kế không chổi than đáng tin cậy hơn, hiệu suất cao hơn và ít ồn hơn.
Cổ góp là một công tắc điện quay theo chu kỳ đảo chiều dòng điện giữa rôto và mạch truyền động.
Nó bao gồm một hình trụ kim loại được cấu tạo bởi nhiều đoạn tiếp xúc trên rôto. Hai hoặc nhiều tiếp điểm điện được gọi là “chổi than” được làm bằng vật liệu dẫn điện mềm như carbon ép vào cổ góp, tạo ra một tiếp điểm trượt với các đoạn của cổ góp khi nó quay.
Trong khi phần lớn động cơ được sử dụng trong Servo là động cơ AC thiết kế không chổi than; động cơ nam châm vĩnh cửu có chổi than đôi khi được sử dụng làm động cơ Servo vì tính đơn giản và chi phí thấp.
Loại động cơ DC có chổi than phổ biến nhất được sử dụng trong các ứng dụng Servo là động cơ DC nam châm vĩnh cửu.
Động cơ DC không chổi than thay thế chổi than vật lý và cổ góp bằng một linh kiện điện tử để đạt được sự chuyển mạch, thường thông qua việc sử dụng cảm biến Hall hoặc encoder.
Động cơ xoay chiều thường không có chổi than, ngoài ra có một số thiết kế – chẳng hạn như động cơ phổ thông, có thể chạy bằng nguồn AC hoặc DC, có chổi than và có thể chuyển mạch cơ học.
Động cơ Servo đồng bộ hay không đồng bộ
Trong khi động cơ DC thường được phân loại là có chổi than hoặc không chổi than, động cơ AC thường được phân biệt bằng tốc độ quay của trường đồng bộ hoặc không đồng bộ của chúng.
Ở đầu bài viết mình có chia sẻ rằng trong động cơ xoay chiều, tốc độ được xác định bởi tần số của điện áp nguồn và số lượng cực từ.
Tốc độ này được gọi là tốc độ đồng bộ. Do đó, trong động cơ đồng bộ, rôto quay cùng tốc độ với từ trường quay của stato.
Tuy nhiên, trong động cơ không đồng bộ, thường được gọi là động cơ cảm ứng, rôto quay với tốc độ chậm hơn từ trường quay của stato.
Tuy nhiên, tốc độ của động cơ không đồng bộ có thể thay đổi bằng cách sử dụng một số phương pháp điều khiển như thay đổi số cực và thay đổi tần số.
Nguyên lý hoạt động của Servo Motor
Nguyên lý hoạt động của động cơ Servo DC
Nguyên lý hoạt động của động cơ Servo DC dựa trên cấu tạo của bốn thành phần chính: động cơ DC, thiết bị cảm biến vị trí, cụm bánh răng và mạch điều khiển.
Tốc độ của động cơ DC dựa trên điện áp được sử dụng.
Để điều khiển tốc độ động cơ, thường sử dụng một chiết áp để tạo ra một điện áp tương ứng như một trong những đầu vào cho bộ khuếch đại điện áp.
Trong một số mạch, xung điều khiển được sử dụng để tạo ra điện áp tham chiếu DC tương ứng với vị trí hoặc tốc độ mong muốn của động cơ và nó được áp dụng cho bộ chuyển đổi điện áp độ rộng xung.
Độ dài của xung quyết định điện áp đặt tại bộ khuếch đại nhằm tạo ra một điện áp phù hợp tương đương với tốc độ hoặc vị trí mong muốn.
Đối với điều khiển kỹ thuật số, PLC hoặc bộ điều khiển chuyển động (vị trí) khác được sử dụng để tạo xung theo chu kỳ nhiệm vụ nhằm xây dựng nên các quy trình điều khiển chính xác hơn.
Cảm biến tín hiệu phản hồi thông thường là một chiết áp nhằm tạo ra điện áp tương ứng với góc tuyệt đối của trục động cơ thông qua cơ cấu bánh răng. Sau đó, giá trị điện áp phản hồi được sử dụng ở đầu vào của bộ khuếch đại để so sánh.
Bộ khuếch đại so sánh điện áp được tạo ra từ vị trí hiện tại của động cơ do phản hồi của chiết áp và vị trí mong muốn của động cơ tạo ra sai số của điện áp dương hoặc âm.
Điện áp này được áp dụng cho phần ứng của động cơ. Khi sai số tăng lên, điện áp đầu ra được áp dụng cho phần ứng động cơ. Miễn là có điện áp đầu vào, bộ khuếch đại so sánh sẽ khuếch đại điện áp đầu vào và cấp nguồn tương ứng cho phần ứng.
Động cơ quay cho đến khi điện áp bằng không. Nếu sai số âm, điện áp phần ứng đảo chiều và do đó phần ứng quay theo hướng ngược lại.
Nguyên lý làm việc của động cơ Servo AC
Nguyên lý làm việc của động cơ Servo AC dựa trên cấu tạo của hai loại động cơ AC Servo khác nhau: đồng bộ và không đồng bộ (cảm ứng).
Động cơ Servo xoay chiều đồng bộ bao gồm stato và rôto. Stato bao gồm khung hình trụ và lõi stato.
Cuộn dây phần ứng quấn quanh lõi stato và cuộn dây được nối với dây dẫn qua đó cung cấp dòng điện cho động cơ.
Rôto bao gồm một nam châm vĩnh cửu và khác với rôto kiểu cảm ứng không đồng bộ ở chỗ dòng điện trong rôto được tạo ra bởi điện từ và do đó những loại này được gọi là động cơ Servo không chổi than.
Khi trường stato được kích thích với điện áp, rôto chạy theo từ trường quay của stato với cùng tốc độ hoặc đồng bộ với trường kích thích của stato, và đây là kiểu đồng bộ.
Với rôto nam châm vĩnh cửu này, không cần dòng điện rôto nên khi trường stato giảm dần và dừng thì rôto cũng dừng lại. Các động cơ này có hiệu suất cao hơn do không có dòng điện rôto.
Khi vị trí của rôto so với stato được yêu cầu, một bộ encoder được đặt trên rôto và cung cấp tín hiệu phản hồi cho bộ điều khiển động cơ Servo.
Stato động cơ Servo xoay chiều không đồng bộ hoặc cảm ứng bao gồm lõi stato, dây quấn phần ứng và dây dẫn và rôto bao gồm trục và cuộn dây lõi rôto.
Hầu hết các động cơ cảm ứng có chứa một phần tử quay, rôto hoặc lồng sóc.
Chỉ có cuộn dây stato được cấp nguồn xoay chiều.
Trường từ thông xoay chiều được tạo ra xung quanh cuộn dây stato với nguồn điện xoay chiều. Trường thông lượng xoay chiều này quay với tốc độ đồng bộ.
Từ thông quay vòng được gọi là từ trường quay (RMF). Tốc độ tương đối giữa từ trường quay stato và các dây dẫn của rôto gây ra lực điện từ cảm ứng trong các dây dẫn của rôto theo định luật cảm ứng điện từ Faraday. Và đây chính là nguyên lý tương tự xảy ra trong máy biến áp.
Bây giờ, dòng điện cảm ứng trong rôto cũng sẽ tạo ra một trường từ thông xoay chiều xung quanh chính nó. Từ thông rôto này trễ hơn từ thông stato.
Vận tốc rôto có quan hệ giữa từ thông stato quay và rôto quay cùng chiều với từ thông stato.
Rôto không bắt kịp tốc độ từ thông stato hoặc không được đồng bộ, do đó được gọi là loại không đồng bộ.
Ứng dụng động cơ Servo
Các ứng dụng động cơ Servo được áp dụng trong nhiều hệ thống và sản phẩm công nghiệp và thương mại, chẳng hạn như với robot, các động cơ Servo được sử dụng ở mọi “khớp” của robot để thực hiện góc chuyển động chính xác.
Tính năng lấy nét tự động của máy ảnh sử dụng một mô-tơ Servo được tích hợp trong máy ảnh để điều chỉnh chính xác vị trí của ống kính để làm sắc nét hình ảnh khi bị mất nét.
Và với các hệ thống định vị ăng-ten, động cơ Servo được sử dụng cho cả định vị phương vị và trục độ cao của ăng-ten và kính thiên văn, thường được sử dụng bởi đài quan sát thiên văn vô tuyến quốc gia.
Trên đây, MESIDAS đã chia sẻ cho các bạn những kiến thức tổng quan về động cơ Servo. Hy vọng với lượng thông tin ở trên, sẽ giúp ích được cho các bạn trong quá trình tìm hiểu, nghiên cứu, học tập và làm việc với động cơ Servo. Xin cảm ơn!